

Az anyagmozgatási-, rakodási feladatok a mezőgazdaság valamennyi ágazatában a technológiai folyamatok szerves része. A termeléshez szükséges, és a megtermelt termékek rakodása eltérő üzemeltetési körülmények között, gyakran a területen nagyon rossz talajállapotok mellett történik. Emellett a rakodott anyagok nagyon eltérő fizikai-, morfológiai tulajdonságokkal rendelkeznek, a különböző ömlesztett áruktól a bálázott-, vagy egyéb darabárukig. Az ebből adódó széleskörű üzemeltetői igények kielégítésére – a gyártók- és fejlesztők folyamatos innovációs tevékenységének eredményeként – számos, különböző konstrukciós megoldásokkal találkozhatunk.
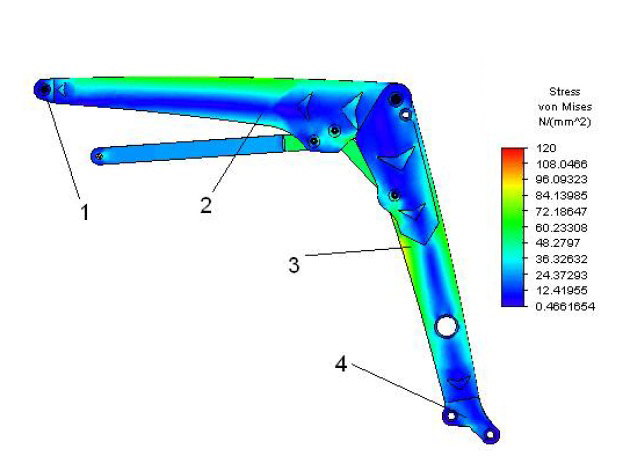
A különböző volumenű rakodási feladatok ellátására a széleskörű választékban – az üzemek részére – a traktoros homlokrakodóktól a kisteljesítményű-, kis emelőképességű-, kis helyigényű gépektől, a négykerék kormányzású- és törzscsuklós teleszkópos gépeken át nagy rakodási teljesítményű homlokrakodó gépekig tart. A homlokrakodó gépek mozgékonyságuknál fogva a forgó-rakodó gépek használatát erősen háttérbe szorította. A különböző konstrukciójú mezőgazdasági rakodógépek fejlesztésében azonban számos azonos, illetve hasonló fejlesztési irányvonallal találkozhatunk. Ilyenek – a jó minőségű szerkezeti anyagok mellett – a nagy folyásszilárdságú anyagok alkalmazása, ami egyben a gyártástechnológia fejlesztését, hegesztő robotokat-, lézertechnológiát-, CNC megmunkálást-, hőkezelési eljárásokat jelent. A tervezésben pedig általános az AutoCAD szoftverek-, a modellek-, a végeselem-módszer alkalmazása. (1. ábra)
A rakodási teljesítmények növelése, a rakodási ciklusidők csökkentése – az emelőképesség növelése érdekében – az emelőhidraulikus körben, az állandó szállítóképességű fogaskerék szivattyúk kiváltása, a jól szabályozható szállítóképességű axiál-dugattyús hidraulika szivattyúkkal. Az így kialakított hidraulikuskör párhuzamosan, több emelési munkaművelet egyidejű végzését is lehetővé teszi, amit megkönnyít a digitális ISOBUS adatátvitel. Az ISOBUS rendszerű digitális adatátvitel- és érintőképernyős kezelőfelületek általános megoldások, még a kisebb teljesítményű, egyszerűbb konstrukciójú, szerkezeti kialakítású gépeken is. Természetesen – szinte valamennyi konstrukció esetében, de különösen a teleszkópos homlokrakodókon – nagy gondot fordítanak a digitális ellenőrzőrendszerek kijelző- és letiltó rendszerének fejlesztésére. Az üzemeltetés javítását és az emelőképesség javítását szolgálják a gémszerkezet kialakítására, a párhuzamvezetésre vonatkozó újabb kialakítások. A technológiai alkalmazások bővítésére a homlokrakodók mezőgazdasági anyagok rakodására alkalmas munkaeszközökkel szerelhetők fel. (2. ábra) Ennek kapcsán pedig, egyes típusokhoz, újabb fejlesztésű digitális ISOBUS szoftveres munkaeszköz-felismerő rendszereket fejlesztettek ki.

A hazai mezőgazdasági gyakorlatban a rakodási feladatok ellátására a traktoros-, vagy traktorra szerelt homlokrakodó gépeket széles körben használják. A traktoros homlokrakodók esetében – a különböző felhasználói igények kielégítésére – számos, a folyamatos innováció jeleit magánviselő konstrukciós megoldás áll rendelkezésre. A traktoros homlokrakodó választék közül számos, az üzemeltető a traktor gyári színére készített, és egyéb külföldi- és hazai beszállítók gyártmányai közül lehet választani. A traktoros homlokrakodók mechanikus szerkezeti részei – a vázkeret, emelőszerkezet, emelőgém, munkaeszköz csatlakozókeret, munkaeszközök – jól kiforrott konstrukciók. A csatlakozókeret gyorscsatlakozó biztonsági csapokkal csatlakoztatható az üzemeltető traktorhoz. (3. ábra)

Az emelőgém- és munkaeszköz hidraulikus hálózata pedig, csöpögés-mentes gyorscsatlakozó blokkal kapcsolható össze. A traktoros homlokrakodók kiválasztásánál, nem elsősorban az üzemeltető traktor motorteljesítményét, hanem a tömegét- és a hidraulikus rendszer munkavégző kivezérelhető paramétereit – nyomás (bar, kg/cm3) hidraulikaolaj szállítás (l/min, cm3/min) – veszik figyelembe. Ezek a paraméterek határozzák meg az adott traktoros homlokrakodóval elérhető emelőképességet, a megfelelő gémkinyúlás-, vagy emelési magasság elérése mellett, és a biztonságos stabilitási üzemelés mellett. A biztonságos üzemeltetés – a stabilitási paraméterek betartása mellett – a traktoros homlokrakodók emelőképességét, a hidraulikus rendszerbe épített biztonsági nyomásszabályzó szelep a névleges értékre korlátozza. Az újabb fejlesztésű traktoros homlokrakodók hidraulikus rendszerében – egyre több típusnál – a felemelt-, vagy rakodott tömeg ellenőrzésére és esetleges dokumentálására, elektrotenzometrikus mérőcsapokon alapuló mérlegrendszereket is alkalmaznak. A beépített mérlegrendszer emellett, a biztonságos üzemeltetésre vonatkozó adatokat is szolgáltat a gépkezelő számára. Az újabb fejlesztésű traktoros homlokrakodók munkafunkcióinak vezérlése joystick segítségével történik, és az említett paramétereket ISOBUS szoftveres terminálon lehet kezelni.
A traktoros homlokrakodók gémszerkezete, a gémtartó bakhoz csapszeggel csatlakozó, két egymással párhuzamos kialakítású zártszelvényből készült emelőgémből, és a ráépített munkaeszköz gyorscsatlakozó keretből áll. A minél szélesebb körű technológiai alkalmazás érdekében, a traktoros homlokrakodó gépekhez is – az előzőekben (lásd. 2. ábra) bemutatott – széleskörű munkaeszköz-választék áll rendelkezésre. Ez a munkaeszköz állomány gyakran bővíthető, pl. mellső függesztésű rotációs kaszákkal, területet tisztító seprő- és gyűjtőkanállal, vagy éppen rotációs vágószerkezetű gallyazó munkaeszközzel. (4. ábra)

Kisebb területeken-, telepeken-, szérűkben történő rakodási feladatok ellátására fejlesztették ki a különböző konstrukciójú, kis geometriájú homlokrakodó gépek különböző konstrukcióját. A kis fordulási helyszükséglettel rendelkező csúszókerék-kormányzású homokrakodó gépek, az egyéb rakodási munkák ellátása mellett, az állattartótelepeken az istállók kitrágyázási munkáiban használatosak. (5. ábra) Azonban az állattartó telepi- és egyéb korlátozott rakodási helyek rakodási feladatainak az ellátására számos, különböző konstrukciójú – négykerék-kormányzású, kis geometriai építésű, teleszkópos-, törzscsuklós és ennek kombinációja, a törzscsuklós- és teleszkópgémes – változata van jelen a gépkínálatban. Azonban a kis rakodási-, manőverezési igényük miatt, ezeket a gépeket, vagy legalábbis jelentős csoportjukat farm-, vagy akár udvari gépeknek is nevezzük.

A konstrukcióra, a törzscsuklós vázszerkezetre épített két párhuzamos, fix tagból álló egyszerű gémszerkezet a jellemző. Ez a gémszerkezet azonban nem túl nagy (2,5-3,0-3,5 m) emelőmagasságot biztosít a gépeknek. Az emelőmagasság korlátozott növelésére, egyes konstrukcióknál, a csuklós alvázszerkezetnek – a manőverezés szempontjából – előnyös tulajdonságait megtartva, a gémet teleszkópos szerkezetűre alakították ki. A mezőgazdasági alkalmazásokhoz a kis törzscsuklós gépek nagytérfogatú terménykanállal-, trágyamarkoló villával-, bálafogókkal-, tüskékkel-, raklapvillákkal, stb. szerelhetők fel. Ezen túlmenően – egyes típusok – mellső függesztésű rotációs kaszák, vízszintes- és függőleges tengelyű szárzúzók üzemeltetésére is alkalmasak. (6. ábra)

A kisebb geometriai építés az előző előnyökkel jár, azonban ez kisebb emelési magasságot- és emelőképességet jelent. Ez viszont kisebb hajtási-, beépített motorteljesítménnyel és szükséges hidraulikus teljesítmény-igénnyel jár. Ennek köszönhető, hogy a magajáró homlokrakodó gépek gyártásában, először ezeknél a konstrukcióknál jelent meg a belsőégésű motorok kiváltása az elektromos energiaátvitellel.
A kis törzscsuklós traktorok elektromotoros meghajtású változatai – szerkezeti kialakítás, emelőszerkezet, járószerkezeti hajtás, emelőhidraulika- és vezérlése, munkaeszköz csatlakoztatás- és választéka – a belső égésű motorral szerelt alaptípussal teljesen megegyezőek. A járószerkezeti hajtást nagyobb, 10-15 kW, míg a hidraulikus emelőrendszer szivattyúját 2,0-3,0 kW teljesítményű egyenáramú elektromotor végzi. Az áramforrás lítium, Li-ion, vagy ólomsavas zselés akkumulátor Az akkumulátorok 8-10 órás üzemidőre szolgáltatnak energiát. A gépekhez normál, 400 V/16 A akkutöltő-, vagy gyorstöltő tartozik. A gyorstöltővel az elektromos rendszer nagyon gyorsan, akár 1 óra alatt is feltölthető. A különböző konstrukciójú töltőkkel elérhető töltési időket – a töltöttségi szint függvényében – az 1. táblázat szemlélteti.
1. táblázat Töltöttségi szint, töltési idő homlokrakodóknál
| Töltöttségi szint [%] | Töltési idő [h] | ||
| Normál egyfázisú töltés 220 V | Gyors 3 fázisú töltés 400 V | Külső 3 fázisú töltés 400 V | |
| 0–80% | 12 | 1,0 | 3,0 |
| 0–100% | 15 | 1,5 | 3,75 |

A mezőgazdasági üzemekben az univerzális használhatóságuk, nagy választékú munkaeszköz ellátottságuk révén, a rakodási feladatok ellátására a legszélesebb körben, a négykerék kormányzású- és négykerék hajtású, teleszkópos homlokrakodó gépeket alkalmazzák. (7. ábra) Ezek a gépek jól kiforrott konstrukciók, és a felhasználói igények minél tökéletesebb kielégítésére, különböző nagyságrendben, geometriai méretekkel, beépített motor- és hidraulikus teljesítménnyel készülnek. Folyamatos az innováció ezen homlokrakodó gépcsaládok-, gépek esetén is. Az emelőhidraulika ciklusidejének csökkentése az emelőképesség stabilizálására – vagyis a teljesítmények növelése mellett – a biztonságos üzemelés (stabilitás) javítására irányul. Ezért a teleszkópos homlokrakodókhoz korszerű, menet közbeni gémstabilizáló rendszereket, valamint ISOBUS adatátvitelen alapuló, digitális gémterhelés-figyelő rendszereket fejlesztettek ki. A terhelésfigyelő rendszer érzékeli, a felemelt teher tömegéből és a gémkinyúlás nagyságából adódó billentő-nyomaték értéket, és amennyiben az közelít a kritikus értékhez, ledes fényjelzéssel, vagy hangjelzéssel figyelmezteti a gépkezelőt, a kritikus érték elérésekor le is tilthatja az emelési folyamatot. Egyes típusoknál ez a teleszkópos homlokrakodó gép terminálján, kezelőfelületén meg is jeleníthető. (8. ábra)
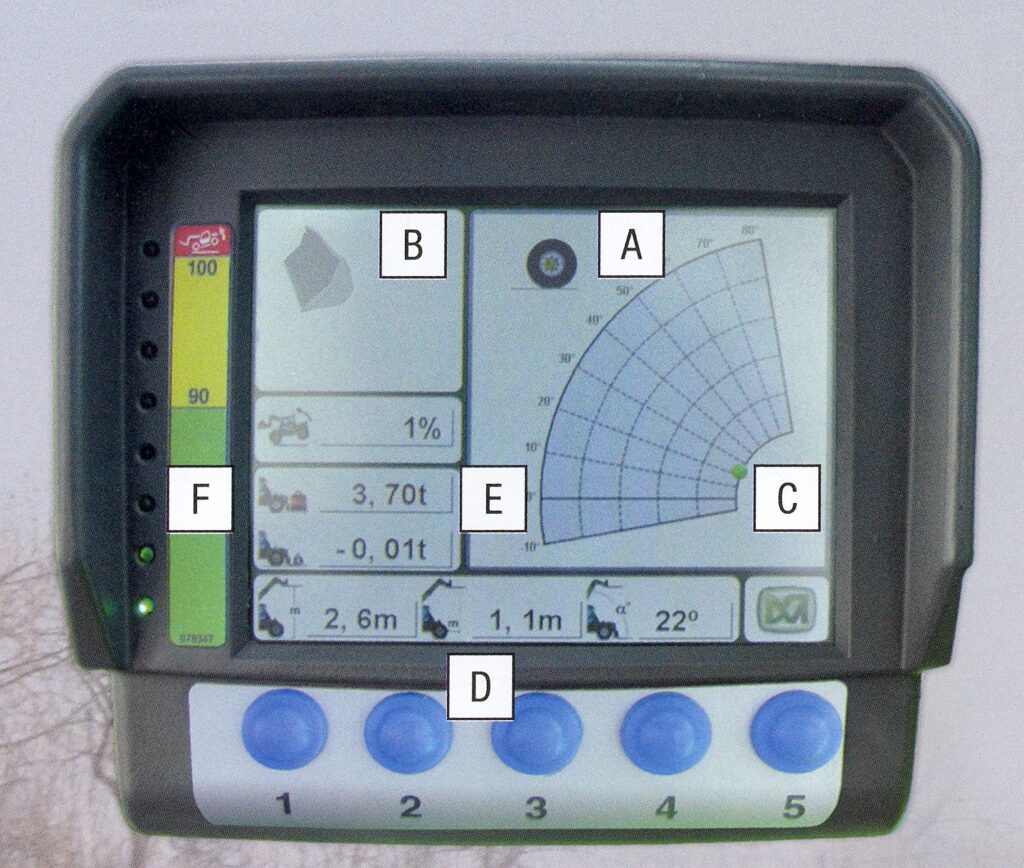
A digitális terminálok – egyes típusoknál – munkaeszköz-felismerő rendszereket is tartalmaznak. A gépkezelő munkáját egyébként is nagyban segítik, az üzemeltetés paramétereit kijelző digitális- és analóg műszerek. A teleszkópos homlokrakodóknál, az említett ciklusidők csökkentésére, és a munkaműveleteknek párhuzamosan, egyidőben történő végzésére, a korábban alkalmazott állandó olajmennyiség szállítású fogaskerék szivattyúkat, a nagyobb teljesítményű, változtatható olajszállító képességű axiál-dugattyús szivattyúkra cserélték, ezek szabályozása pontosabb, a szállított olajmennyiséget nem befolyásolja a terhelés nagysága. A káros anyag, CO2 kibocsátás csökkentésére, ezeknél a gépeknél is alkalmazzák az elektromos energiaátvitelt, a villamos meghajtást. Egyes típusokon a „hybrid”, míg más típusokon a teljes elektromos meghajtást fejlesztették ki. A teleszkópos rakodógépek „hybrid” változatainál, hybrid üzemmódban, a beépített belsőégésű dízelmotor által hajtott generátor folyamatosan tölti a beépített akkumulátorokat, melyek az elektromotor, illetve a járószerkezet- és munkahidraulika hajtásához szükséges energiát szolgáltatják. Ennek következtében csökken a hajtóanyag-felhasználás, és elektromos üzemmódban pedig, a CO2 kibocsátás gyakorlatilag „0”. Az egyéb műszaki paramétereket tekintve pedig – emelőképesség, munkasebesség – az egyéb szériaváltozatokkal megegyeznek a paramétereik. (9. ábra)

Az elektromos meghajtású változat erőforrása 80 V feszültségű, 300-400 Ah-ás Li-ion akkumulátor csoport, a járószerkezeti hajtást a mellső tengelyen épített 9 kW teljesítményű indukciós elektromotor végzi, a hidraulikarendszer hajtási energiáját pedig egy 10 kW-os villanymotor szolgáltatja. A hidraulikaszivattyú max. nyomása 235 bar, a szállítási teljesítménye 80 l/h. Az üzemidő folyamatos üzemben 3 óra, míg szakaszos üzemben 6 óra is lehet. Az akkumulátor töltésére három megoldás közül lehet választani, ezt az 1. táblázat szemlélteti. A haladási sebesség 0-12 km/h. Emelési magasság 4,1-5,9 m, emelőképesség 2600 kg. Egyéb vonatkozásban a gép konstrukcióját tekintve, a hagyományos típussal megegyező.

A nagy emelőképességű homlokrakodóknál is számos innovációs megoldással találkozhatunk. Ezeknél a gépeknél a nagy emelőképesség, a nagy tömegteljesítmény, nagyteljesítményű-, korszerű-, rugalmas üzemű Common Rail motorok, valamint nagyteljesítményű munkahidraulika alkalmazásával találkozhatunk. (10. ábra) Az emelőmechanizmusok, gémszerkezet, munkaeszköz párhuzamvezérlő, és „Z” mechanizmusa jelent új megoldást. (11. ábra) A járószerkezeti hajtásban pedig a – különböző terhelés alatt kapcsolható – Power-Shift váltók mellett, a fokozatmentes CVT rendszerű váltókat is széles körben alkalmazzák.

A nagyteljesítményű és -emelőképességű homlokrakodóknál is találkozhatunk az elektromos „hybrid” hajtású változatokkal.
Az ismertetőből látható, hogy a nagyon szerteágazó mezőgazdasági termeléshez kapcsolódó rakodási feladatok megoldására számos konstrukciós megoldás – a traktoros homlokrakodóktól kezdve, a csúszókormányzású- és törzscsuklós, kis geometriájú homlokrakodókon, és a teleszkópos homlokrakodók, és a nagy emelőképességű-, kétkerék kormányzású homlokrakodókig – áll a felhasználók rendelkezésére. Az ismertetett konstrukciók legújabb fejlesztésű típusai a hazai mezőgép forgalmazók kínálatában elérhetők.
dr. Kelemen Zsolt, műszaki szakértő – Gödöllő